搬运机器人已经在各大工厂和物流基地投入使用,它们的作业步骤是什么样的呢?但是还有很多工厂采取观望态度,除了价格原因,更多的是还不是太了解,对搬运机器人的运行方式不太信任,很多人觉得搬运机器人不如人工操作的安全,其实大部不必,今天我们来了解一下搬运机器人的运行方式吧。
搬运机器人首先通过传感器技术感知周围环境,这些传感器包括摄像头和激光雷达等,能获取位置、距离和障碍物等信息。
接下来,机器人会根据目标位置和环境信息进行路径规划,避开障碍物并确定最优的移动路径。
在导航移动阶段,搬运机器人会根据路径规划结果自主导航。
AGV通常会根据预定的导引系统进行精确定位和导航,而AMR则具备自主感知和决策能力,可以根据环境实时调整移动路径。
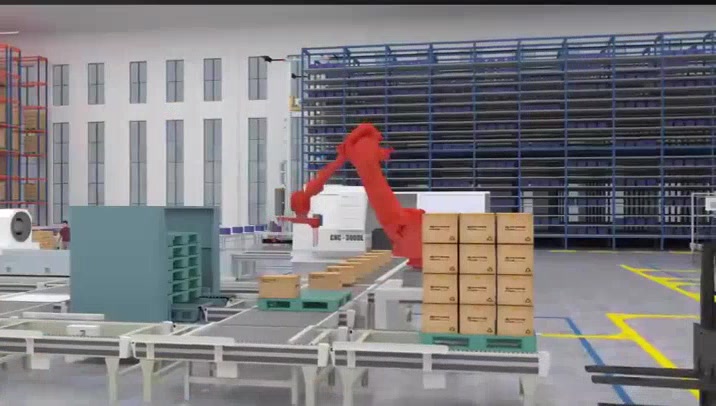
当机器人达到目标位置后,它们会使用机械臂、传送带或其他搬运设备将物料从一个位置移动到另一个位置。
机器人的搬运方式可能因应用而异,可以是抓取、吸盘固定等。
最后,一旦物料搬运任务完成,机器人会返回初始位置或继续下一个任务,根据程序继续执行作业。
现在大家应该对搬运机器人的工作方式有了更深入的了解,在日后看到这些机器人时,不妨多观察它们是如何工作的!
 17351110037
17351110037地址:苏州工业园区唯新路7号
邮箱:sales@kunhouautomation.com
服务热线:17351110037(陈经理)
